HRRLAB






휴머노이드 로봇 연구실
행복한 연구실~
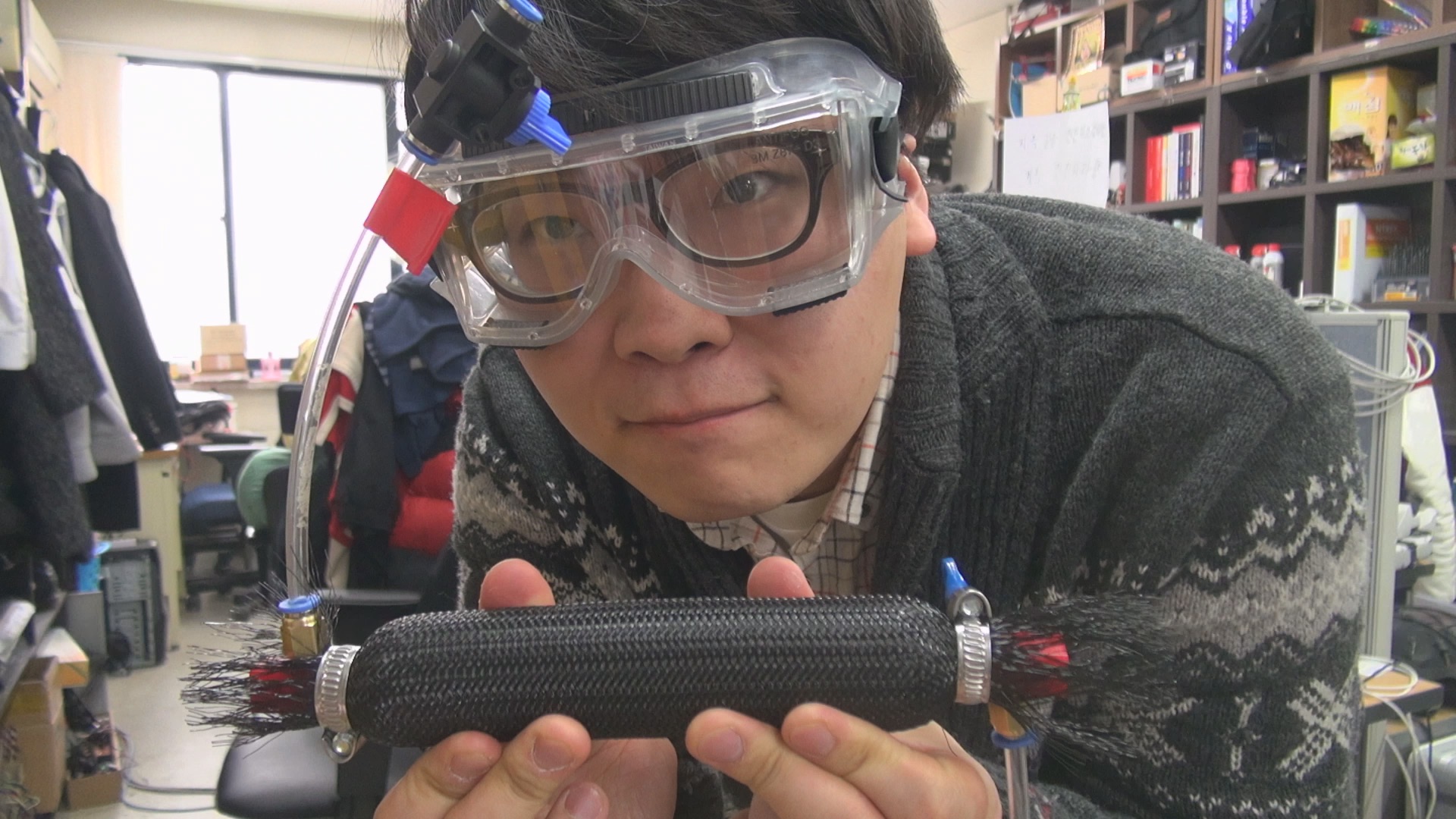
공압근육(Pneumatic Muscle)
공압근육은 80g의 무게로도 약 900N의 인장력을 낼 수 있답니다!
2017 Dept. of Mechanical System Design Engineering, Seoul Nat’l Univ. of Science and Technology, South Korea
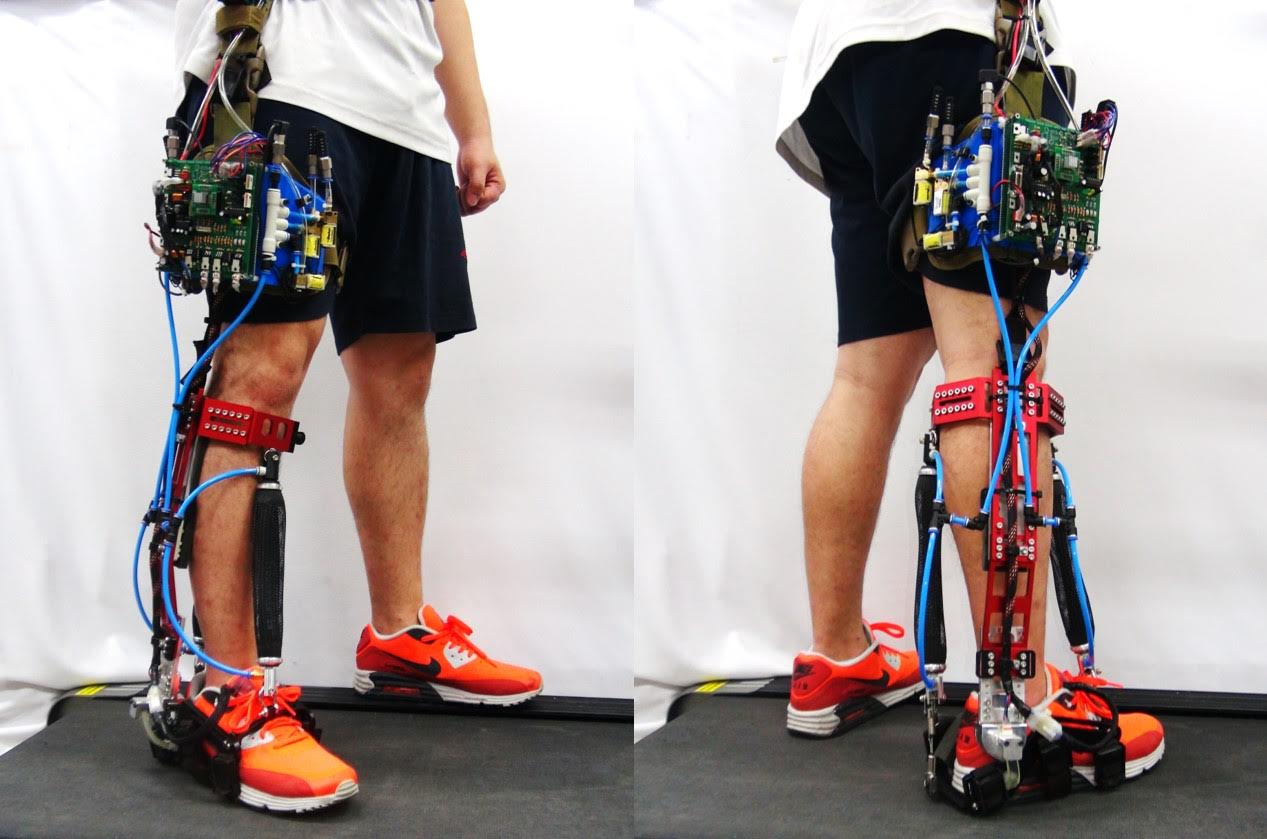
Thesis Title : Development of Ankle Power Assistive Robot using Pneumatic Muscle
논문초록
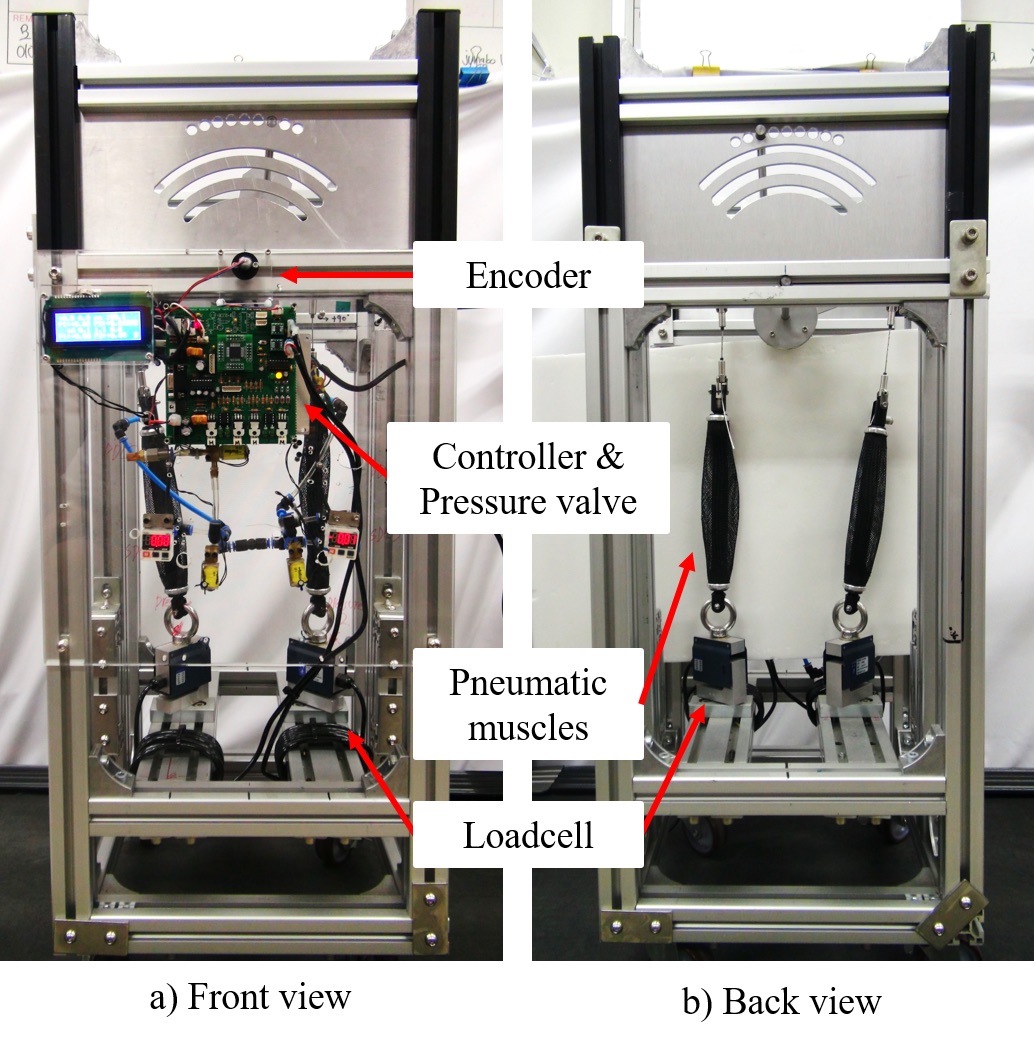
본 논문은 노약자들의 발목근력보조를 위한 착용형 로봇에 대해서 서술하였다. 기존 착용형 로봇들은 보행 시 필요한 근력을 보조하기 위해 대부분 모터와 감속기를 사용하였다. 하지만 모터와 감속기의 조합은 무게가 무거울 뿐만 아니라 감속기 치차의 마찰때문에 실제 사람의 근육과 달리 강성과 토크를 동시에 제어하기 어려운 한계가 있다. 따라서 본 연구에서는 모터/감속기 조합보다 가볍고 안전하며 근력을 보조하는 힘을 충분히 발휘할 수 있는 Mckibben 공압 근육을 사용하였다. 발목의 피칭 모션에 이용되는 종아리 가자미근 및 앞정강근의 힘을 한 쌍의 공압 근육을 사용한 상극구동으로 보조하였으며, 상극구동제어를 위해 상극구동 모델 파라미터들을 실험적으로 도출하였다. 사용자의 보행의지를 판단하고자 발바닥에 부착된 압력변위센서로 압력과 압력중심위치를 측정하여 발바닥의 하중과 발목토크를 계산하였고, 이를 기반으로 공압 근육 관절의 강성과 토크를 동시에 제어하였다. 최종적으로, 트레드밀에서 근전도 신호를 측정하여 발목근력보조로봇의 성능을 실험적으로 입증하였다.